数字图像基础概念
- 边缘视觉对运动敏感,中央视觉对颜色敏感
- 模拟图像和数字图像
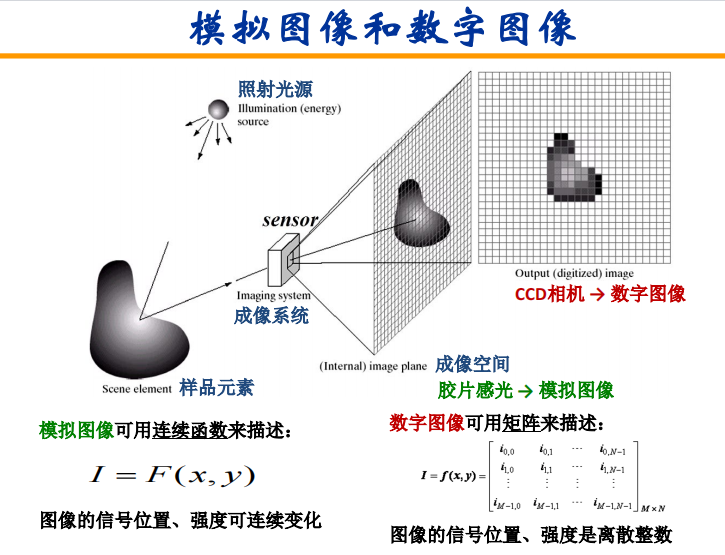
- 数字图像:采集的图像是不连续的,如CCD相机(读出光信号,后处理,好的显微镜普遍使用CCD),CMOS是把感光信号传递到芯片上处理(图像处理更快,但感光面积相比CCD小,光子的探测效率低)
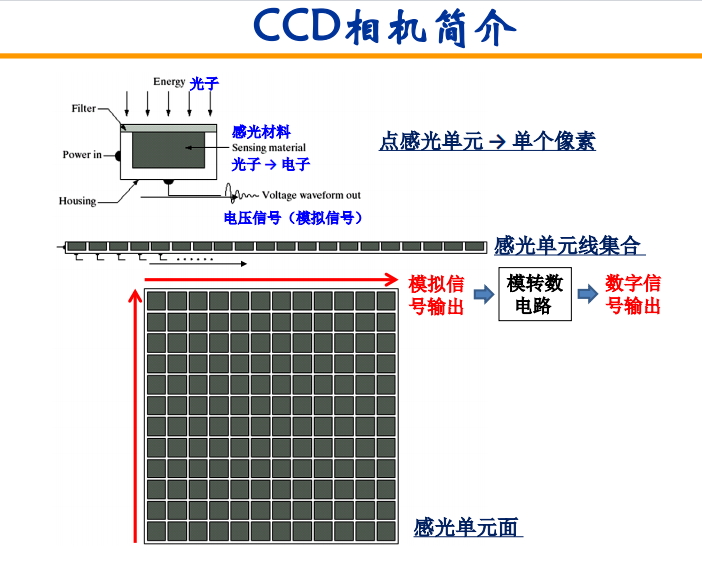
- 模拟图像:连续图像——如感光的胶片
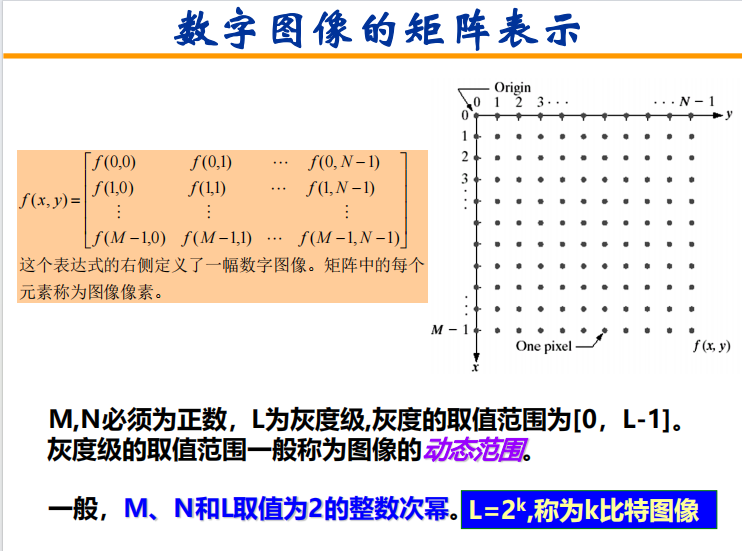
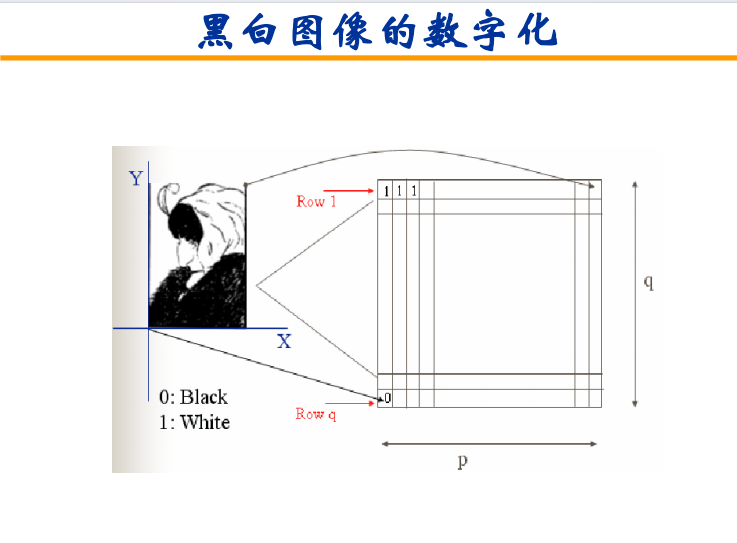
- 像素的位置和灰度:图像的原点在左上角
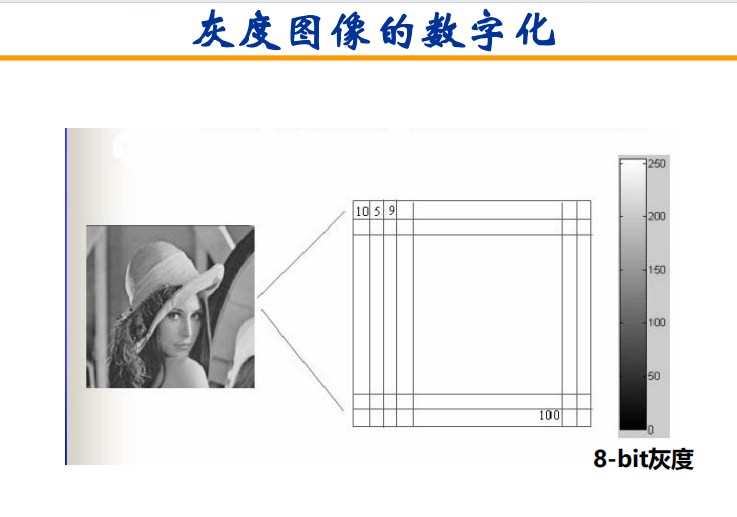
 注:信号强度用灰度表示,一个比特是2,八个比特是2^8
注:信号强度用灰度表示,一个比特是2,八个比特是2^8
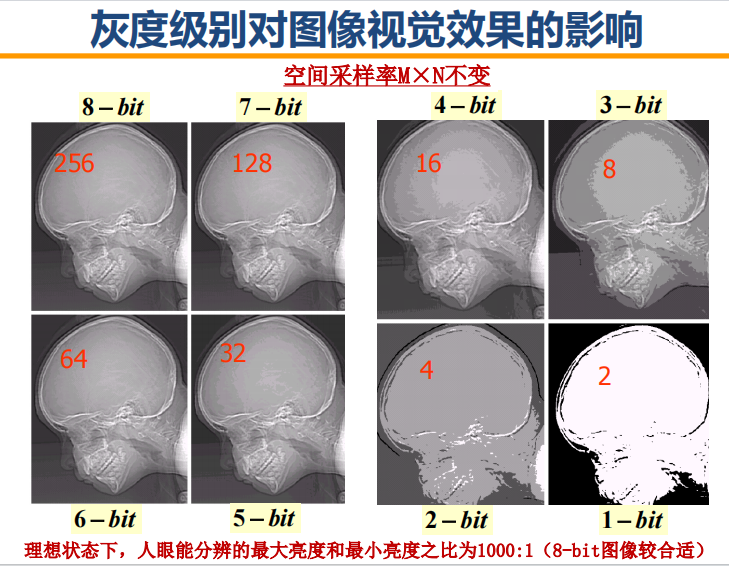
- 人眼对灰度的鉴别能力:最多是1000个左右的灰度值
 注:为什么需要12/16bit图像?——反卷积算法的准确性与bit的深度有关,Bit的深度越高越准确!
注:为什么需要12/16bit图像?——反卷积算法的准确性与bit的深度有关,Bit的深度越高越准确!
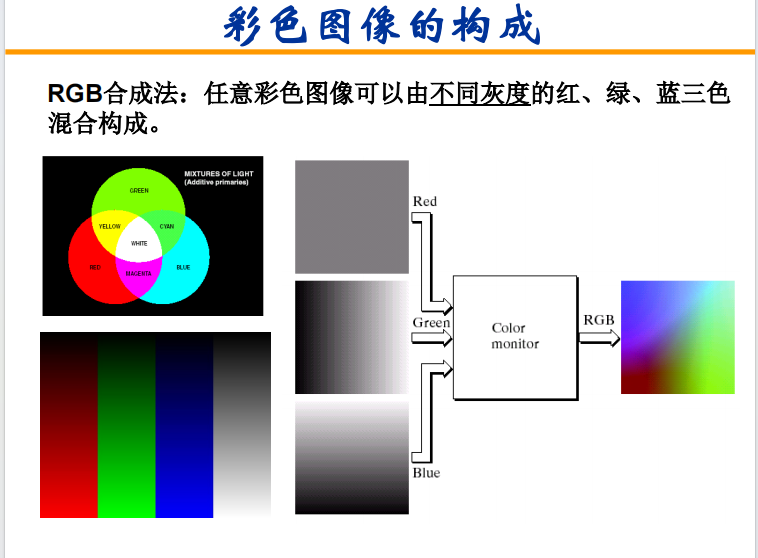
- 彩色图像
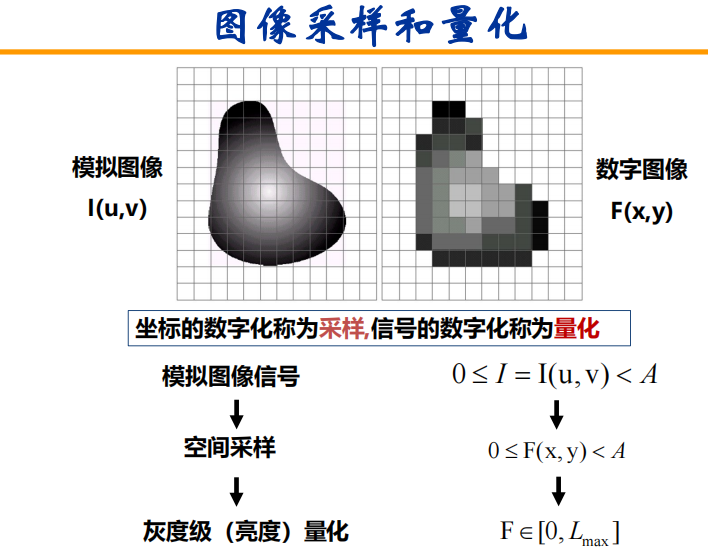
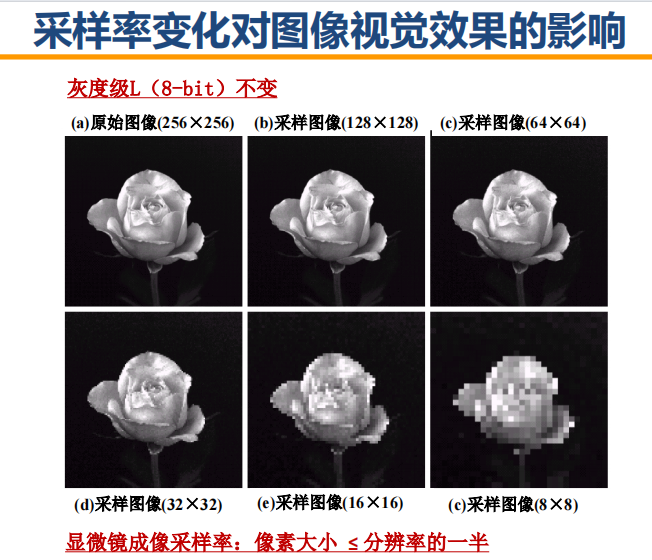
- 图像采样和量化:采样率是分辨率的一倍,分辨率达不到采样率的要求
- 黑白图像的数字化:无灰度梯度

- 采样率变化对图像视觉效果的影响:棋盘状效果
- 灰度级别:灰度级别越来越小,细节会失去
- 总结:
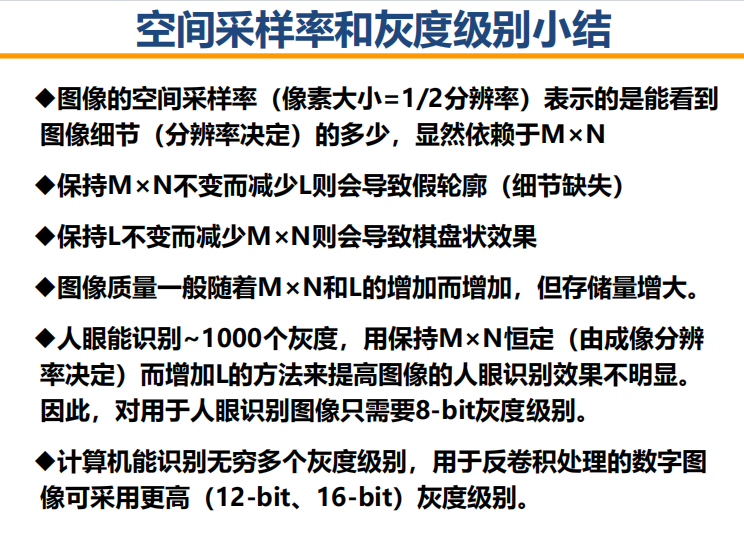
- 数字图像格式:存储格式用TIF,保留了原始图像所有的细节信息
点运算图像增强技术 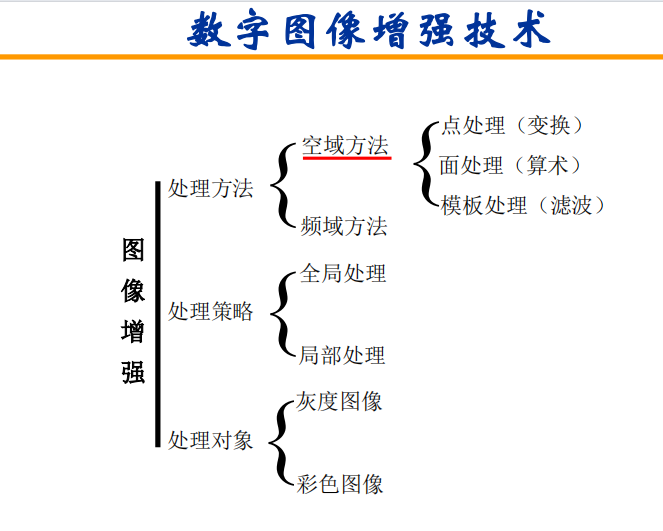
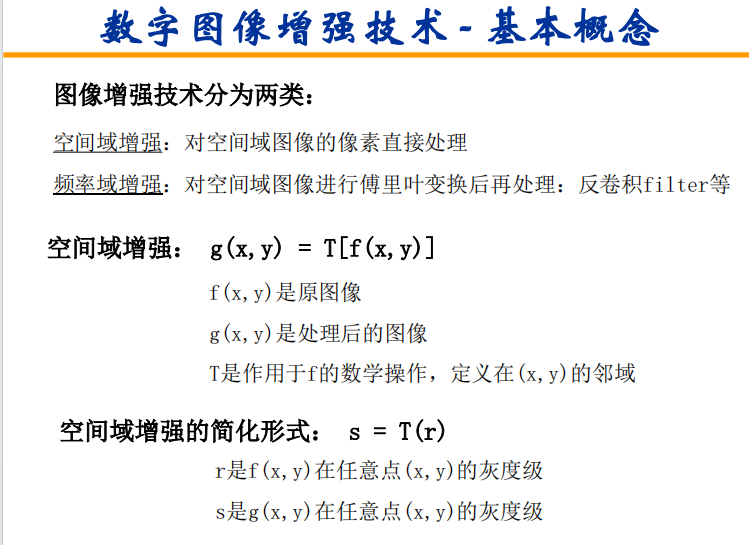
- 点运算:基本概念:

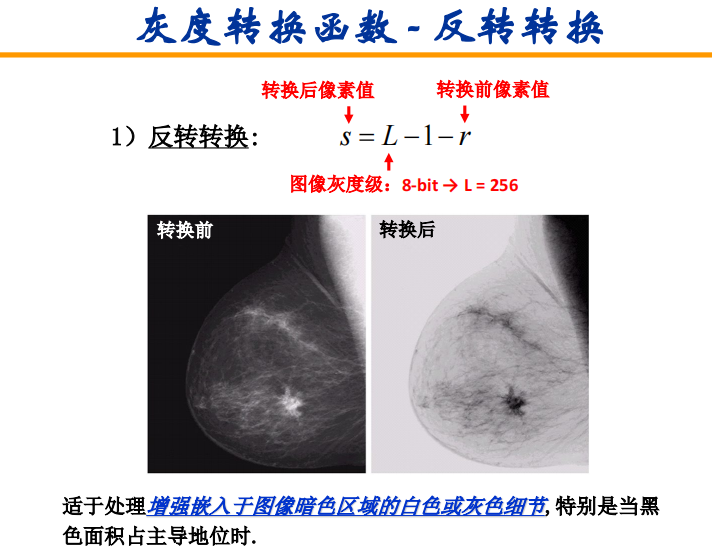
- 反转转换:
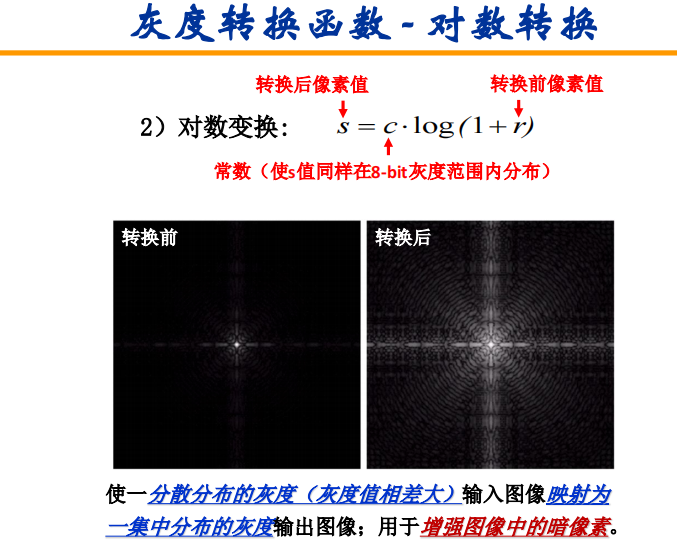
- 对数运算:增强弱信号
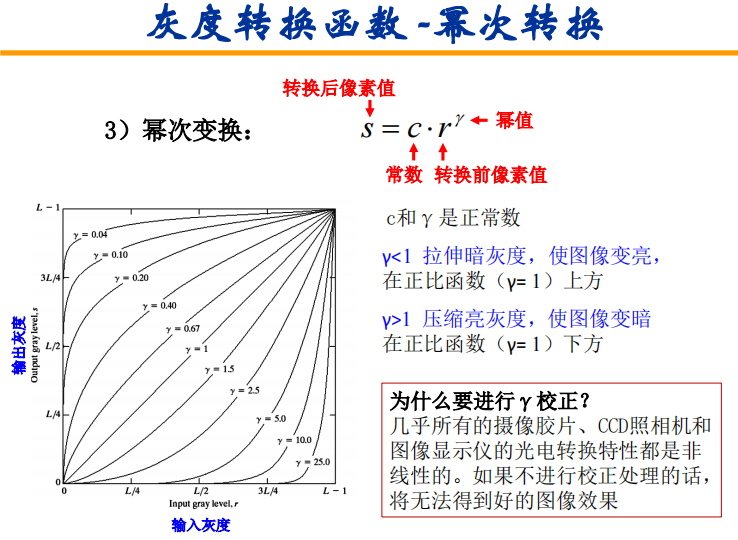
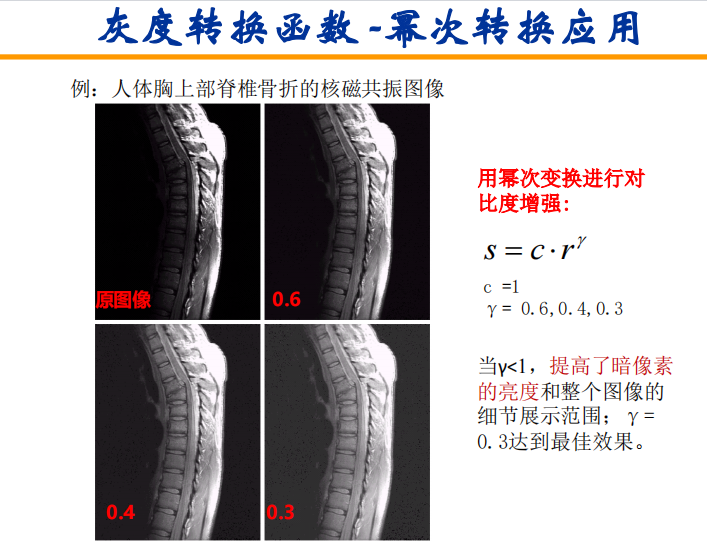
- 幂函数:可变亮或者变暗,便于眼睛区分灰度,对计算机无所谓,细节都知道
 注:不存在过渡曝光
注:不存在过渡曝光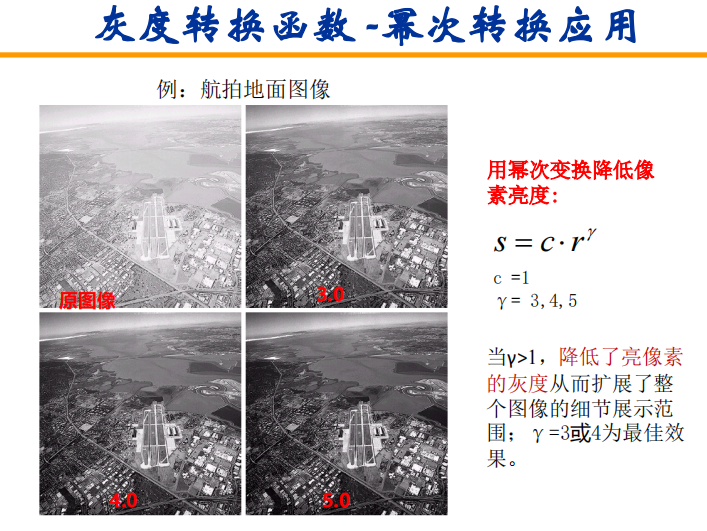
- 面运算:
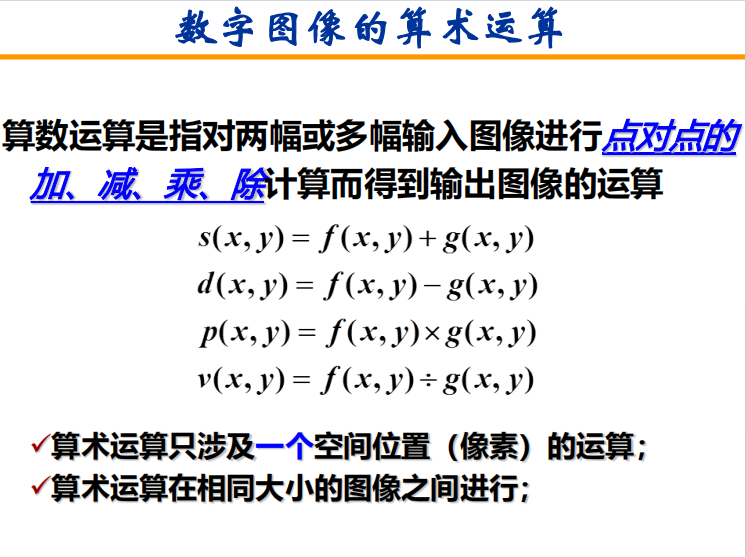
- 加法:
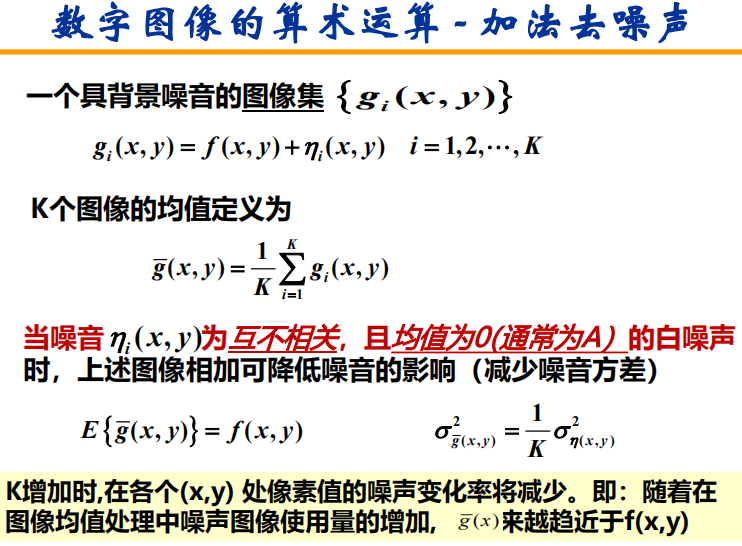 注:采集时间短时——信噪比高——对图像做算术平均值(静止不动),可以降噪音,把背景噪音均一化了
注:采集时间短时——信噪比高——对图像做算术平均值(静止不动),可以降噪音,把背景噪音均一化了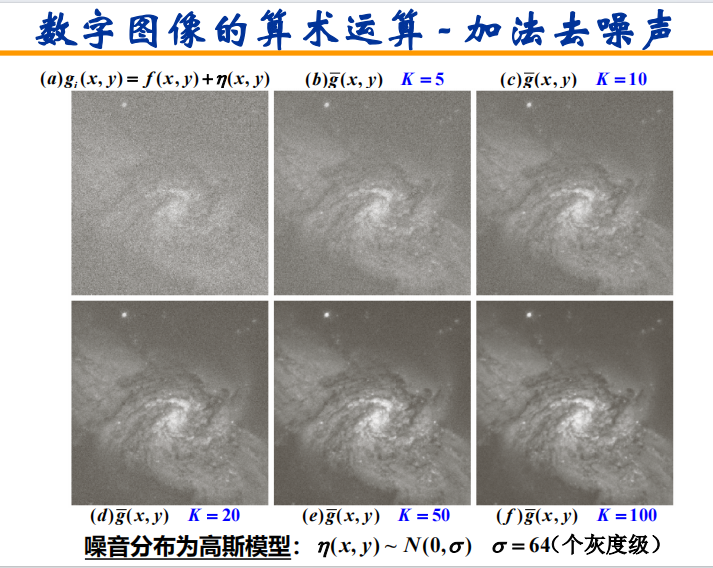
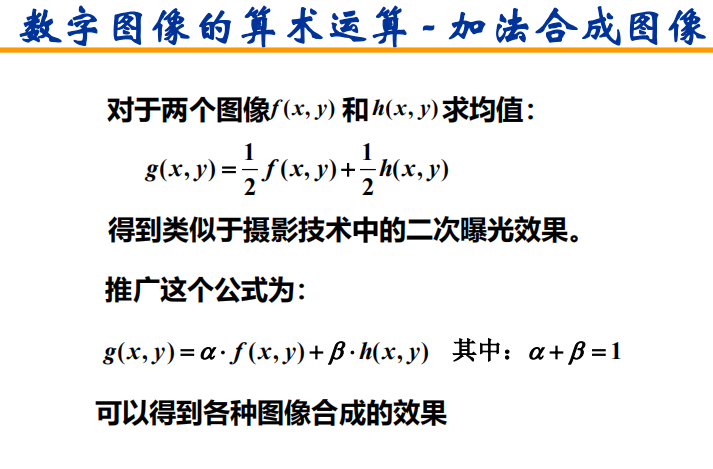
 注:合成图像!
注:合成图像!
- 减法:
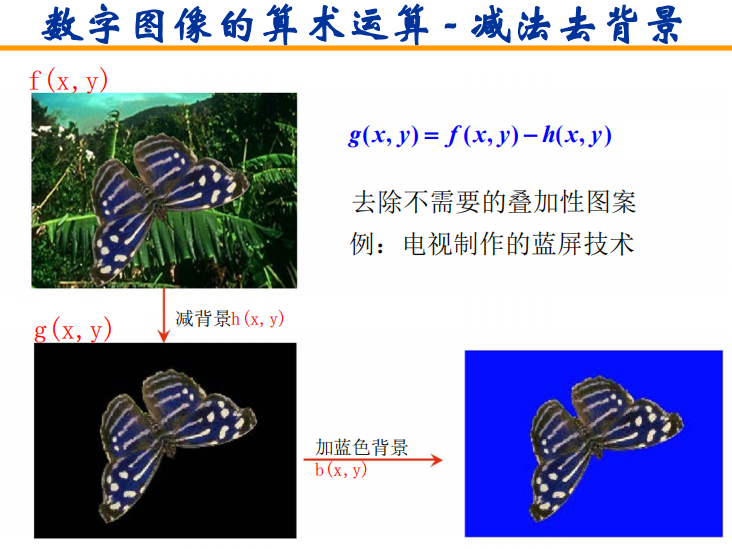 注:如何知道蝴蝶轮廓,需要算法
注:如何知道蝴蝶轮廓,需要算法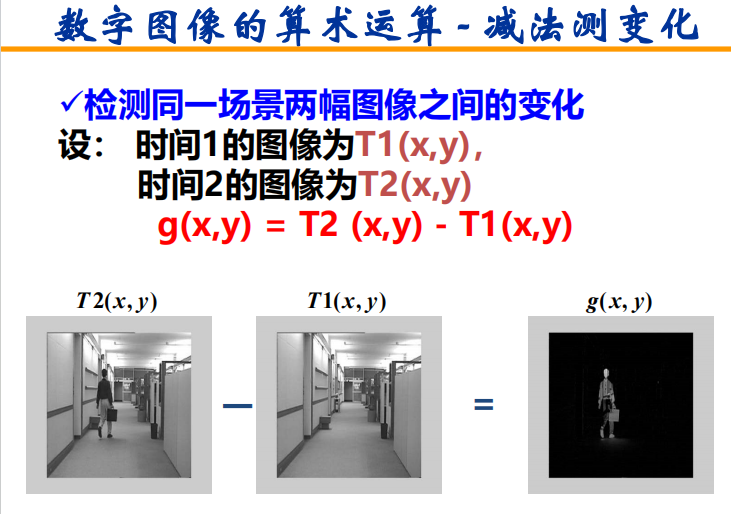
 注:突出了图像中渐变的变化
注:突出了图像中渐变的变化
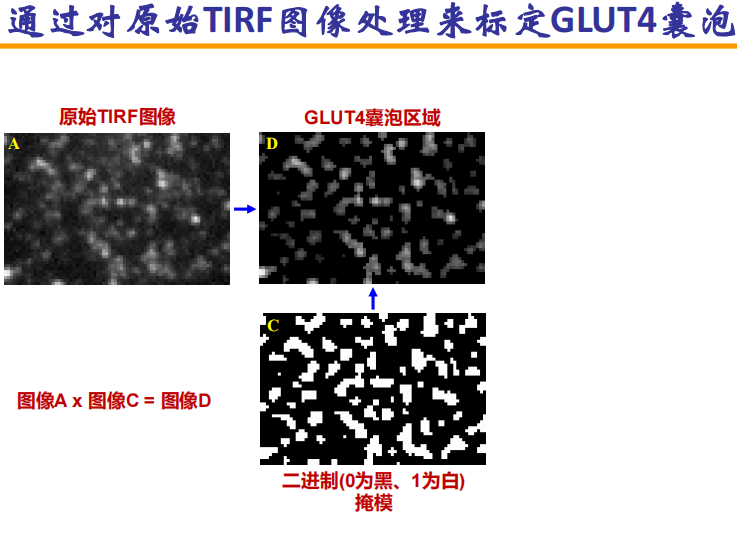
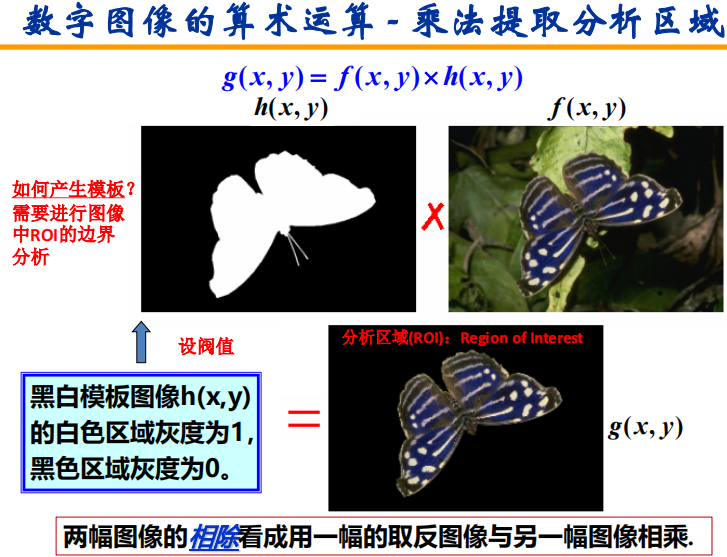
- 乘法:提取轮廓
直方图运算图像增强技术(全局运算)
- 图像的全局特性:
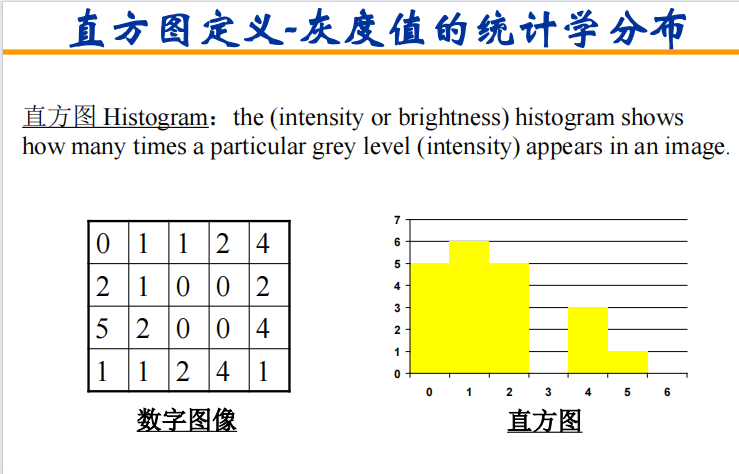
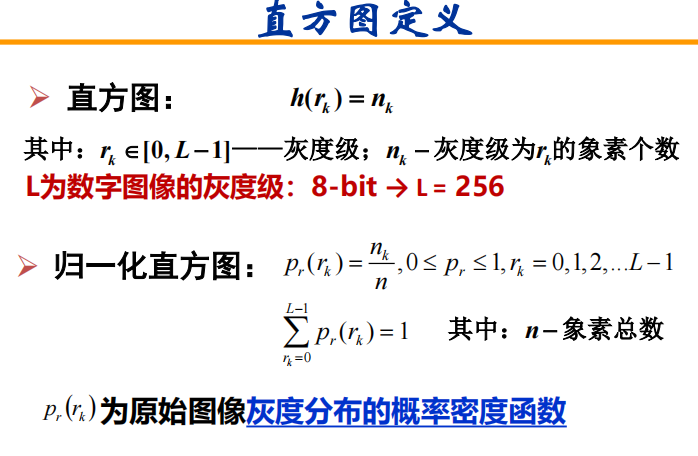 注:直方图代表了不同灰度的像素个数统计。
注:直方图代表了不同灰度的像素个数统计。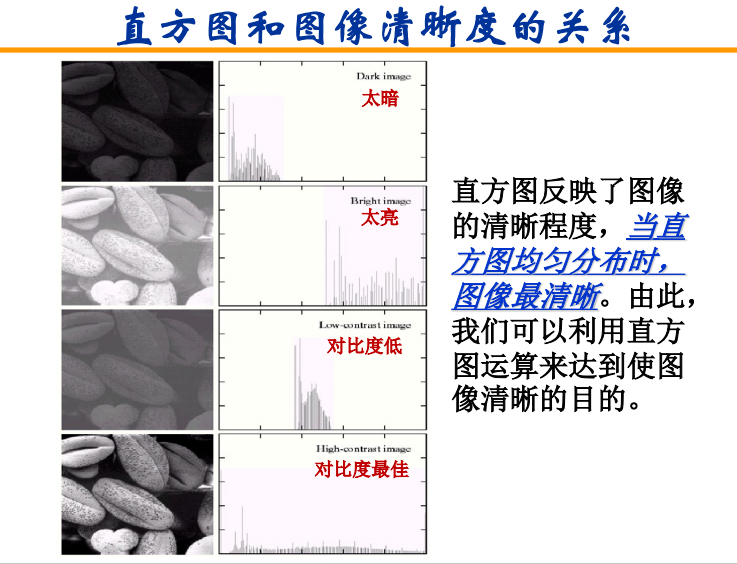 注:最佳的清晰度是均匀地覆盖了0-255的灰度区间
注:最佳的清晰度是均匀地覆盖了0-255的灰度区间
- 对比度拉伸:
 注:对每个像素的灰度值进行计算,负数为0,大于255的的就定义为255
注:对每个像素的灰度值进行计算,负数为0,大于255的的就定义为255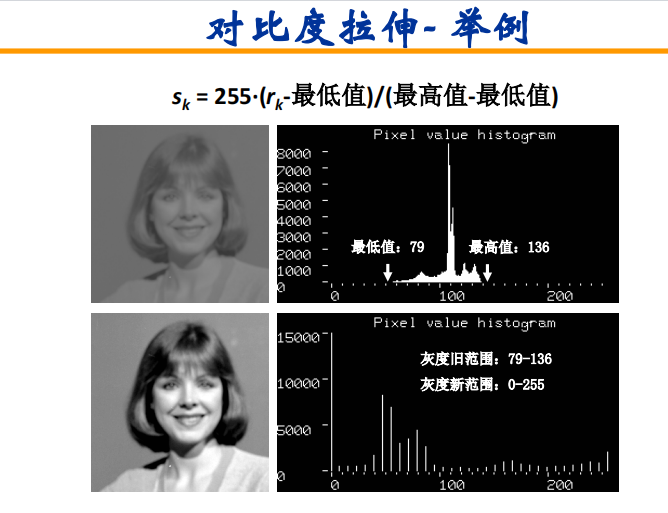
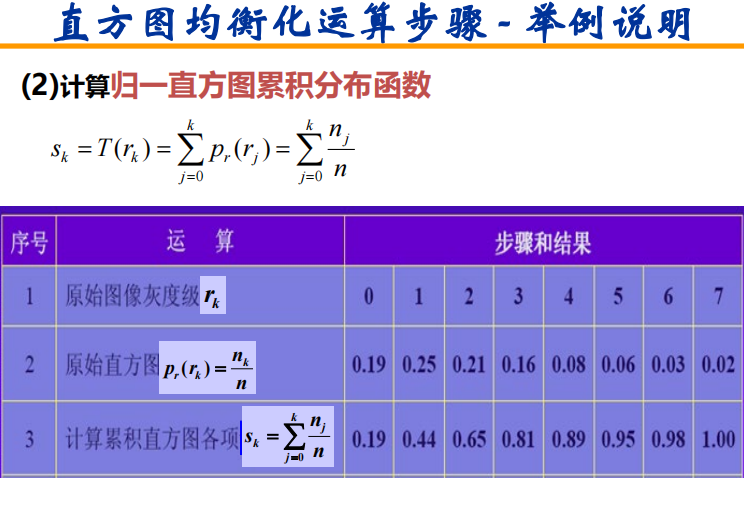
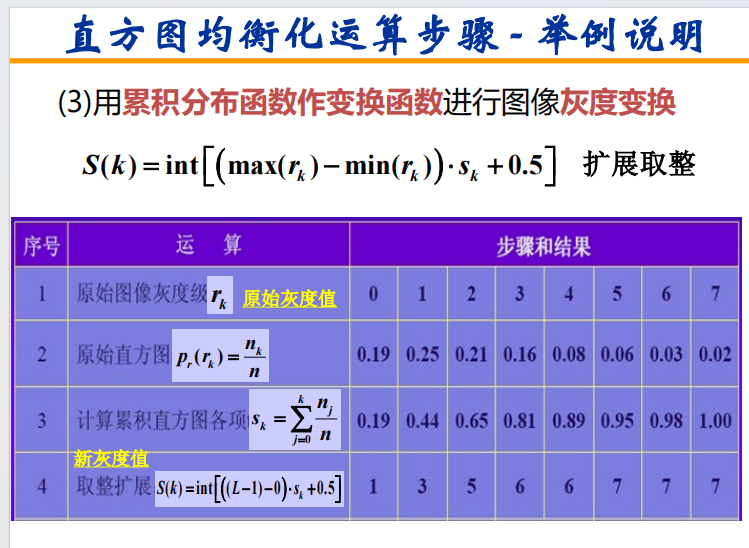
- 直方图均衡化运算:对比度拉伸的算法
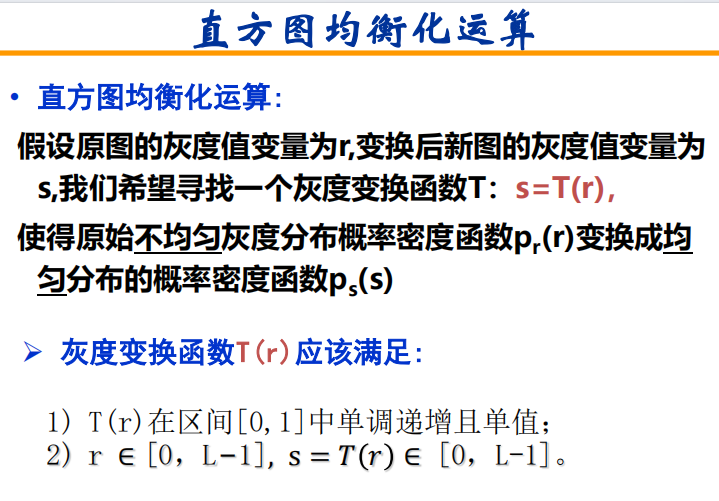
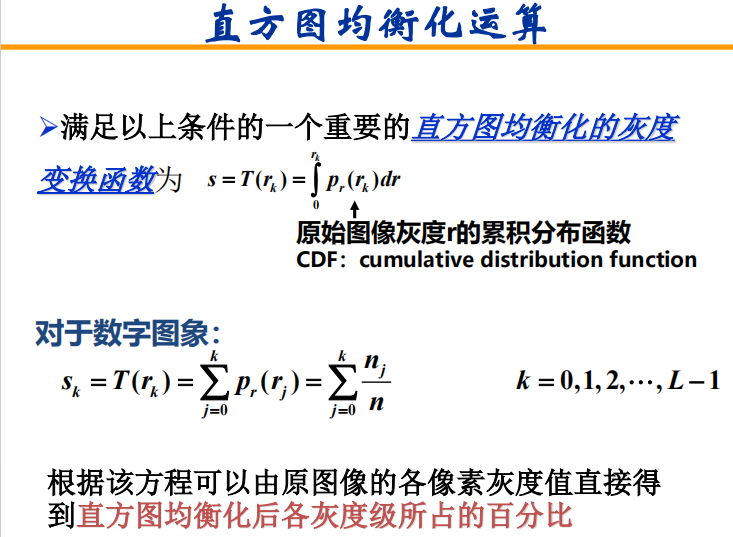
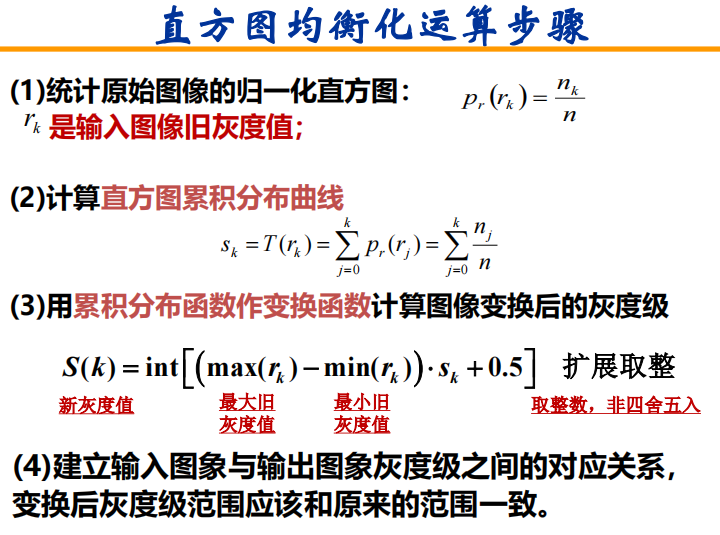 注:nk为改灰度像素出现的次数
注:nk为改灰度像素出现的次数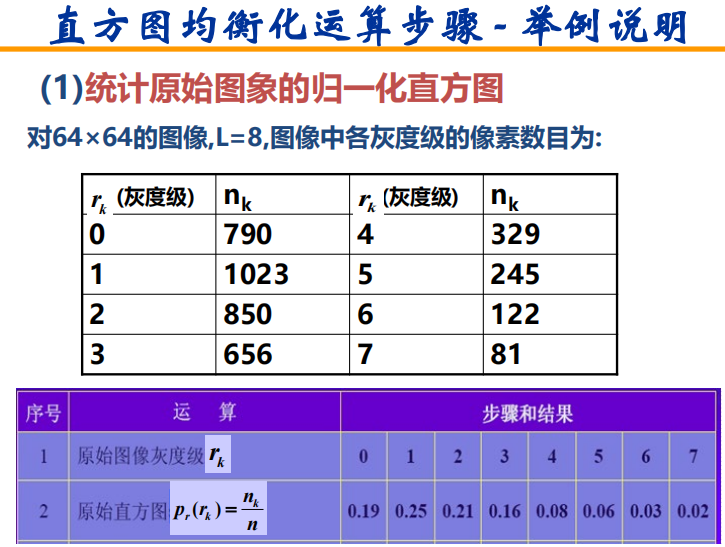
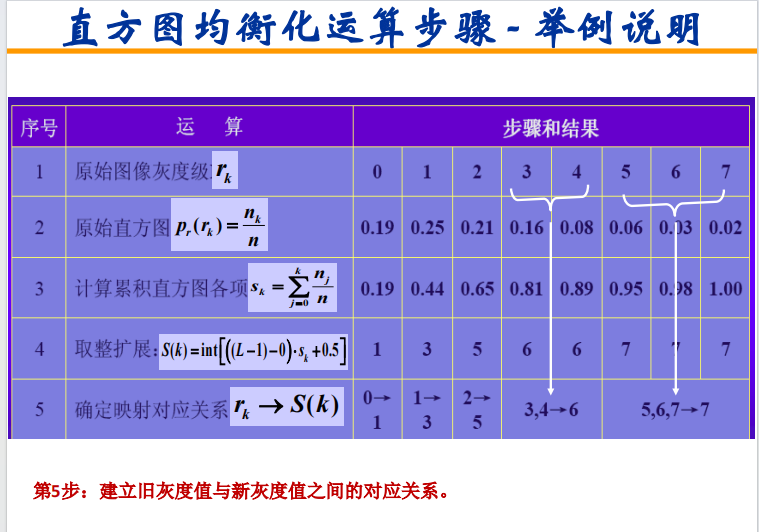
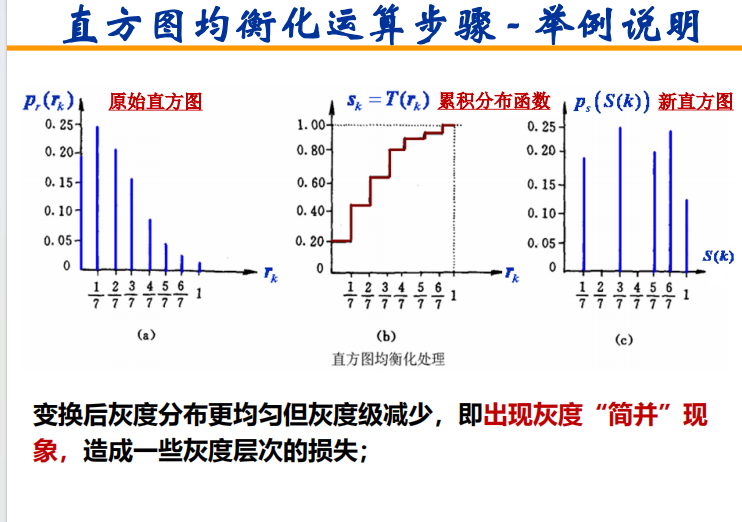
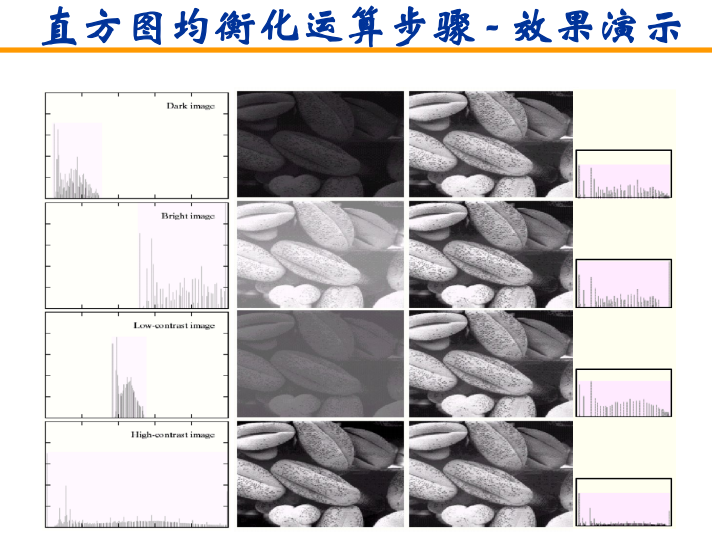 注:效果接近眼睛所认为完美的图像——全局化处理(手机里常用的算法)
注:效果接近眼睛所认为完美的图像——全局化处理(手机里常用的算法)
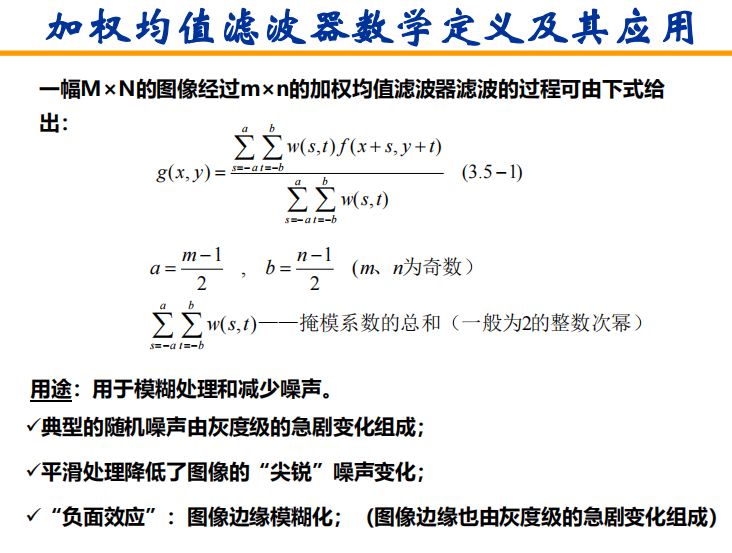
平滑空间滤波器(制造朦胧感)
- 空间滤波演示:过滤不想要的信息,也可以增强信息,这是滤波器的目的
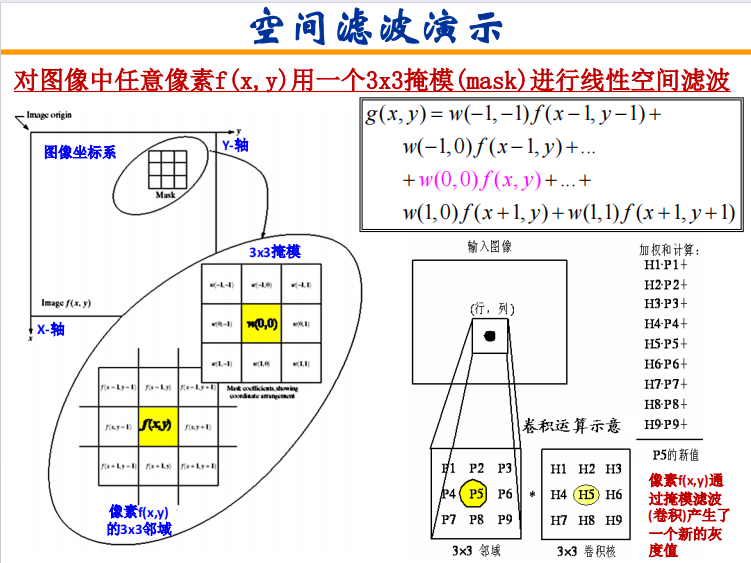 注:掩模操作是局部处理——相同像素的值相乘
注:掩模操作是局部处理——相同像素的值相乘
 注:掩模操作的是最中心像素的灰度值
注:掩模操作的是最中心像素的灰度值
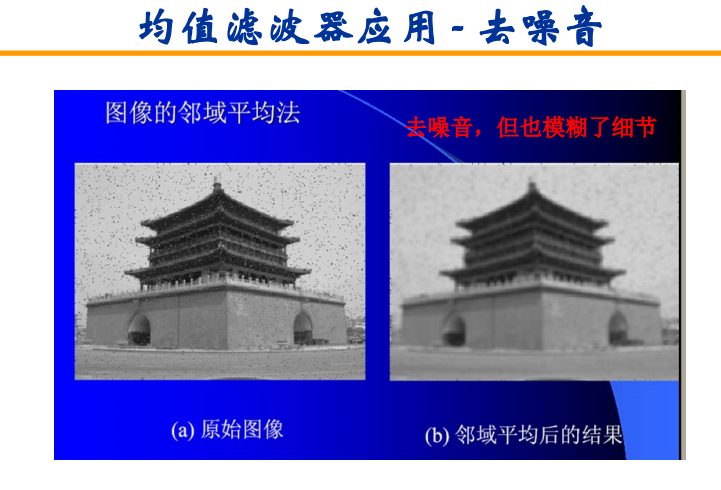
- 平滑空间滤波器:
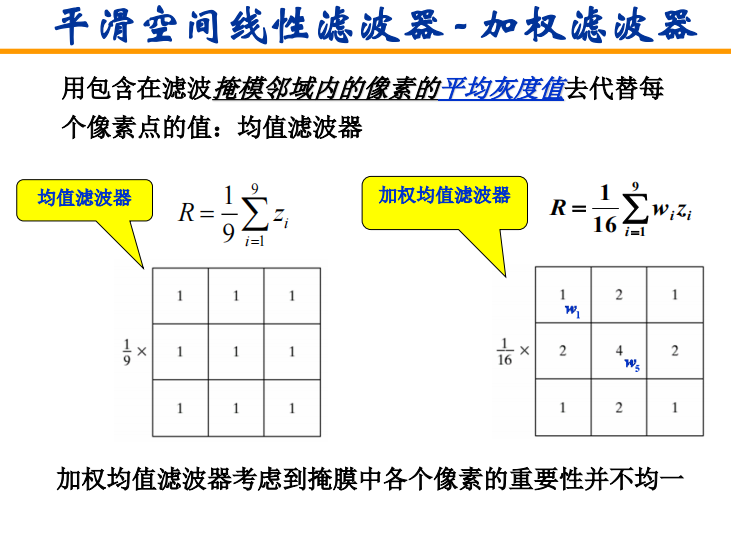
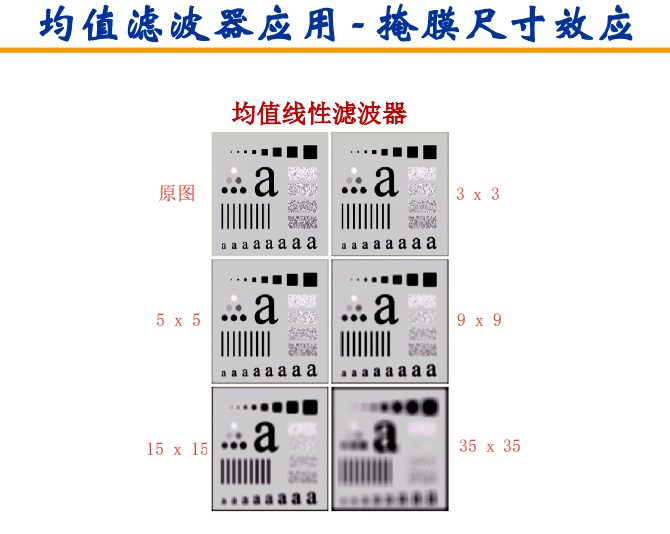 注:局域化控制在3x3就好
注:局域化控制在3x3就好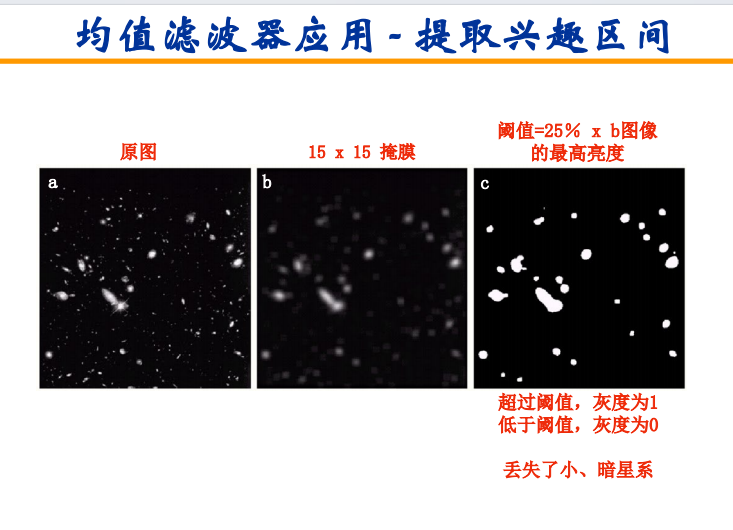 注:可作为轮廓提取的粗糙算法,更精细需要拉普拉斯掩模算法
注:可作为轮廓提取的粗糙算法,更精细需要拉普拉斯掩模算法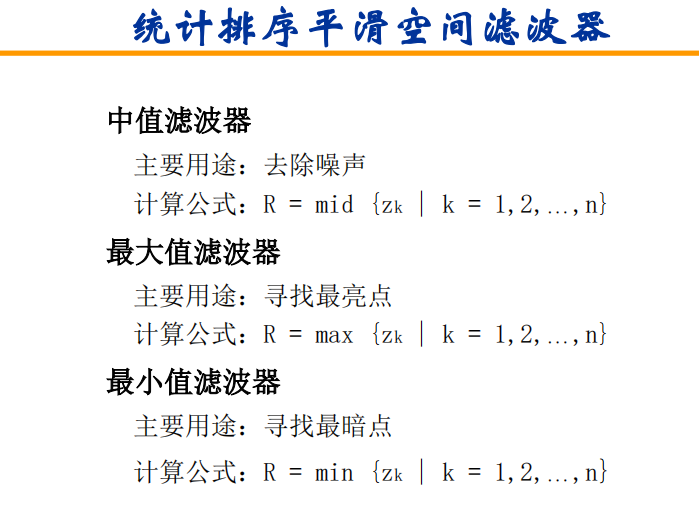
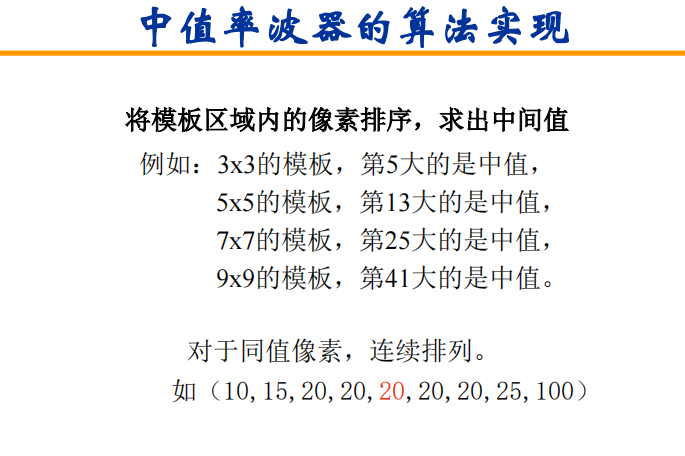
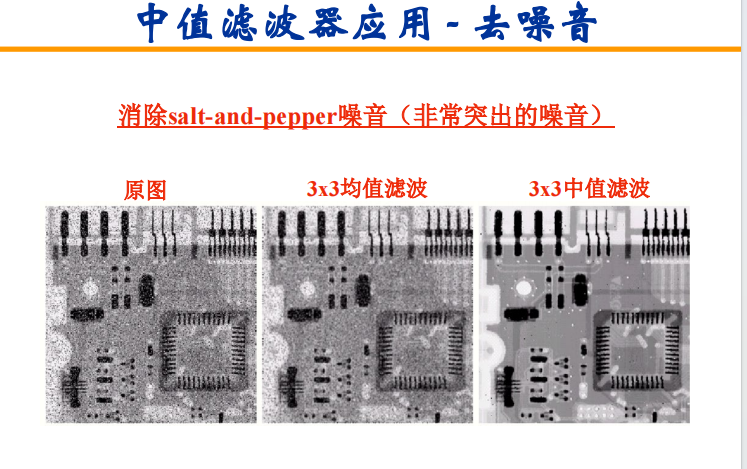
- 中值滤波器:有效保留原图细节,优于均值滤波器

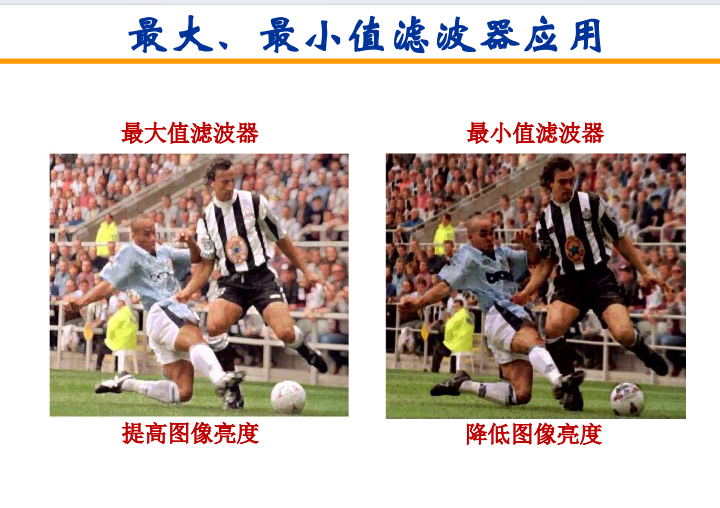
- 最大值/最小值滤波器
锐化滤波器(变的更清晰)
- 用途:

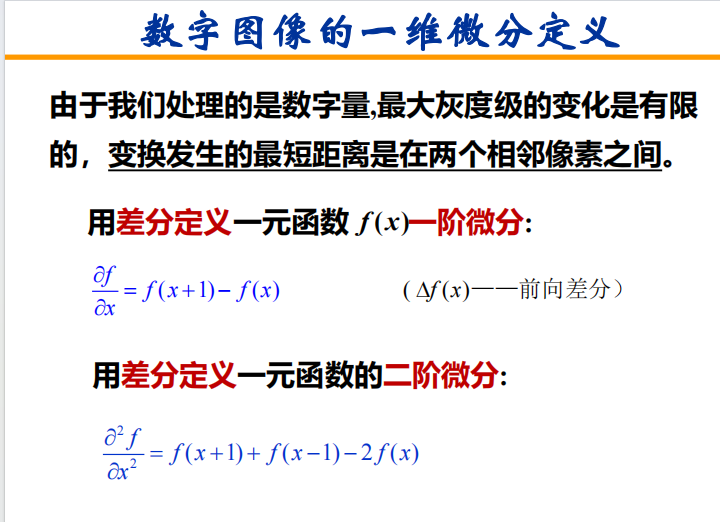
- 数字图像中一维微分的定义:
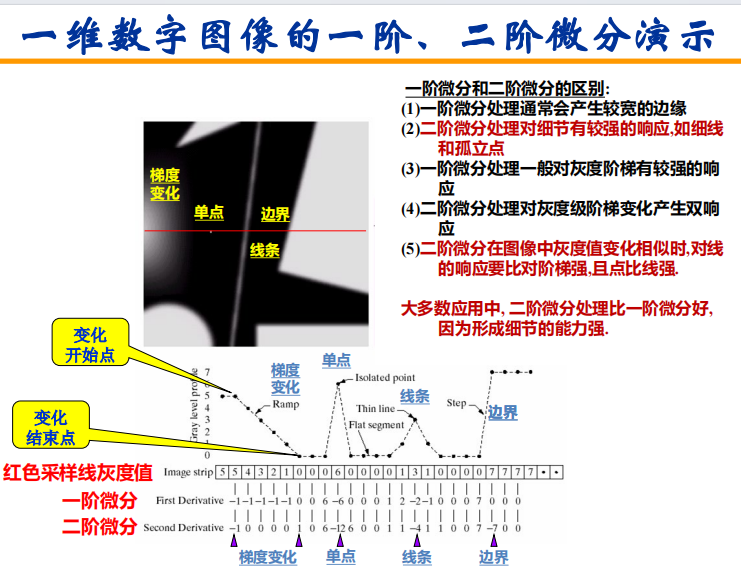 注:二阶函数对渐变边界无法区分(这时候需要一阶求导),对于一个点(有清晰边界的图像)可以区分——处理图像细节的能力更强
注:二阶函数对渐变边界无法区分(这时候需要一阶求导),对于一个点(有清晰边界的图像)可以区分——处理图像细节的能力更强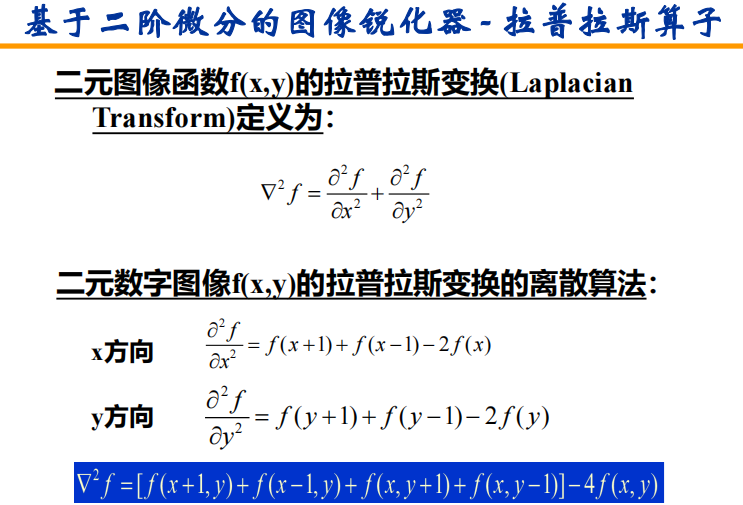
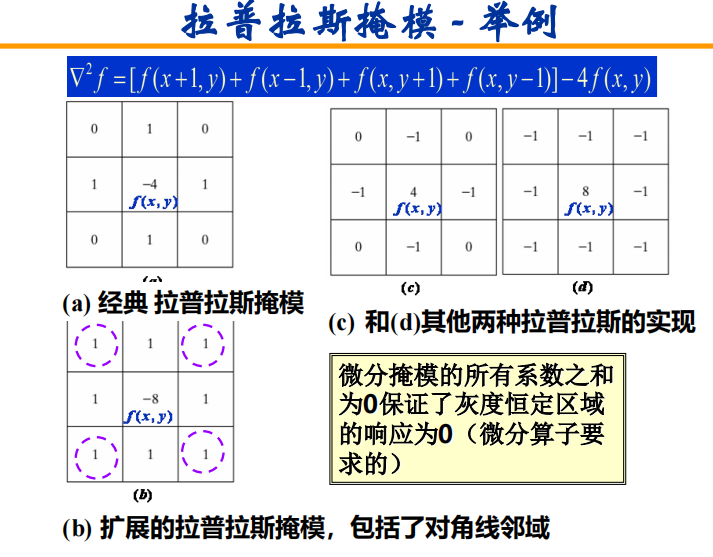
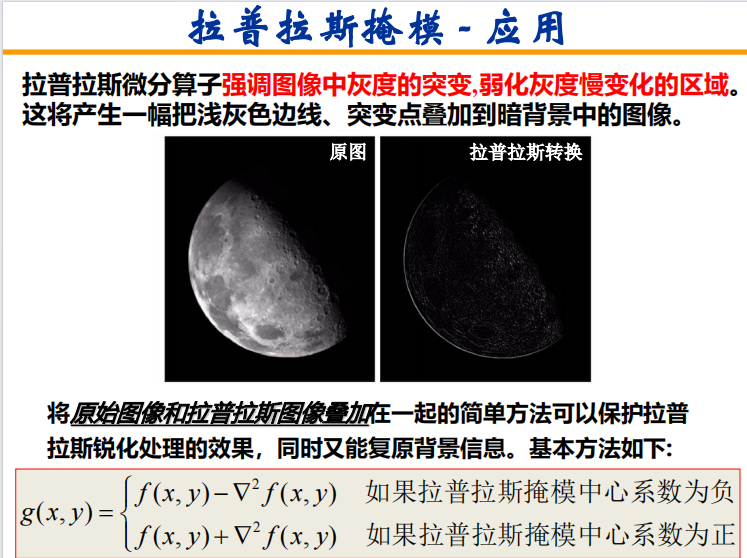
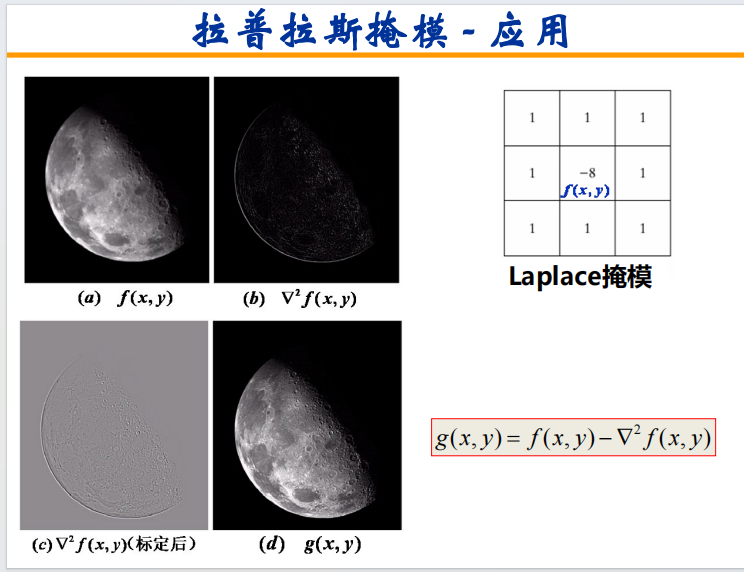 注:拉普拉斯掩模(求边界)的锐化处理——拍星球更清晰了
注:拉普拉斯掩模(求边界)的锐化处理——拍星球更清晰了
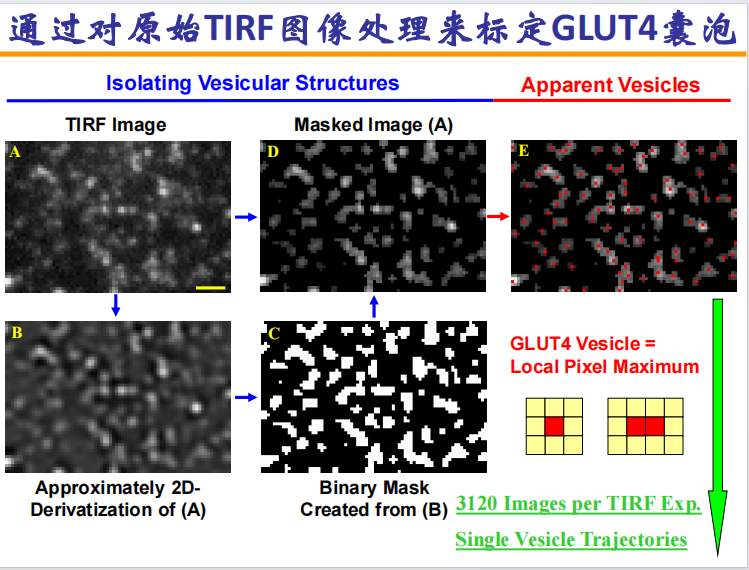
显微镜图像分析举例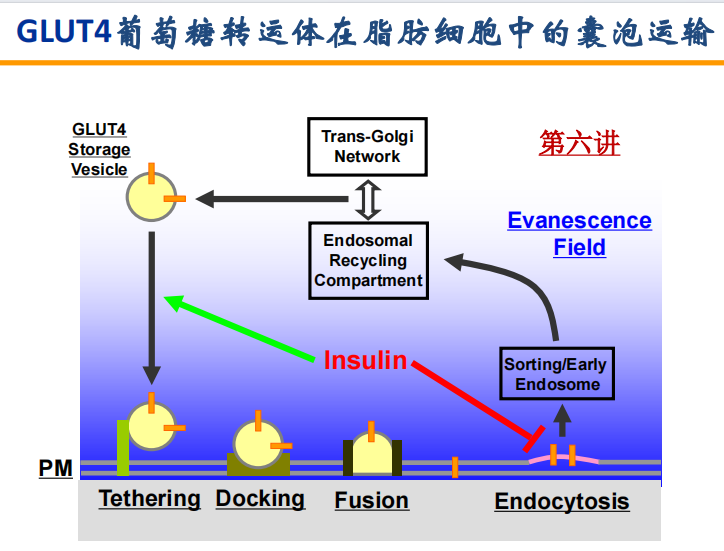
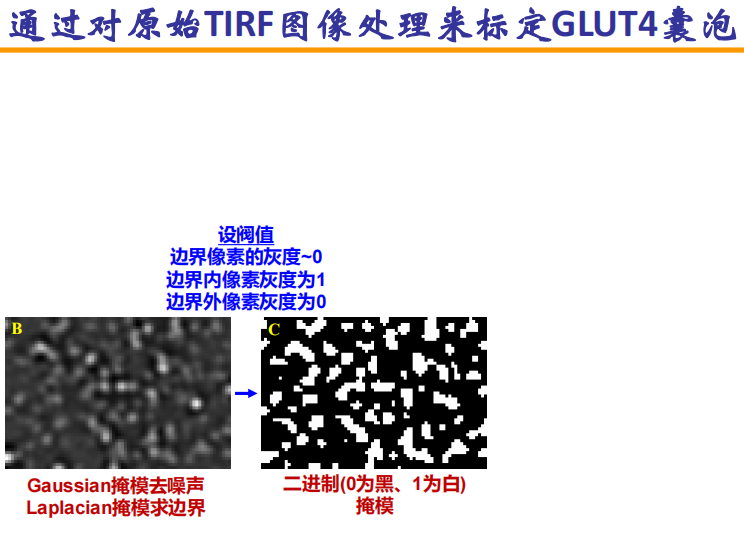
- TIRF的观察:
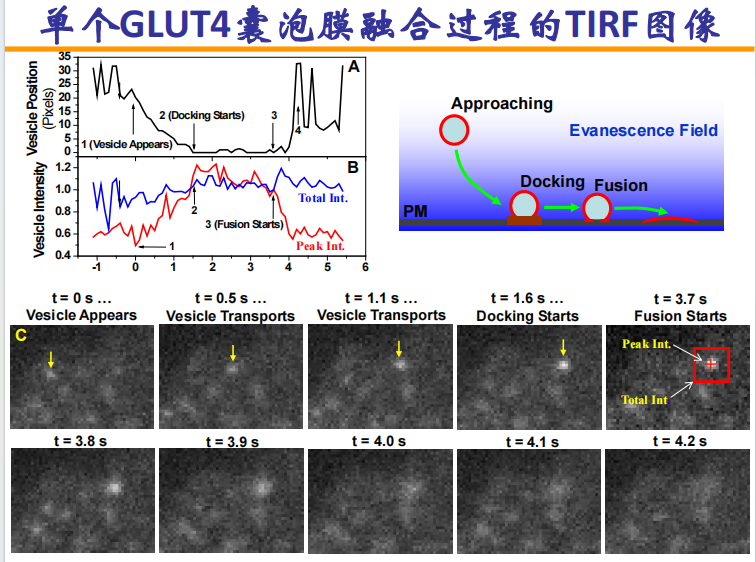
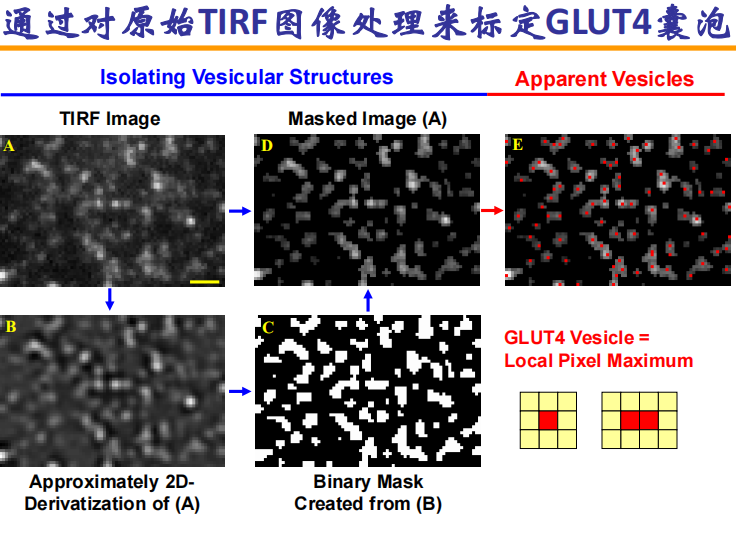
- 算法——看膜融合的过程
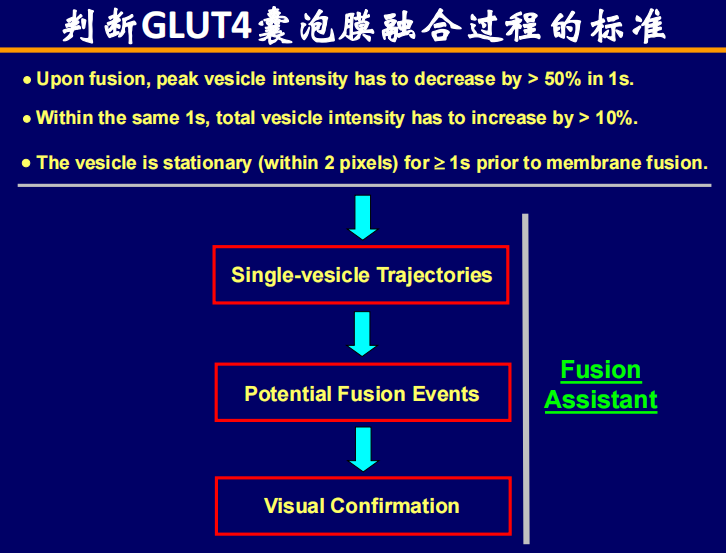 注:给予一定的约束,进而筛选过程,最后的visual confirmation可以通过人工智能的算法来实现
注:给予一定的约束,进而筛选过程,最后的visual confirmation可以通过人工智能的算法来实现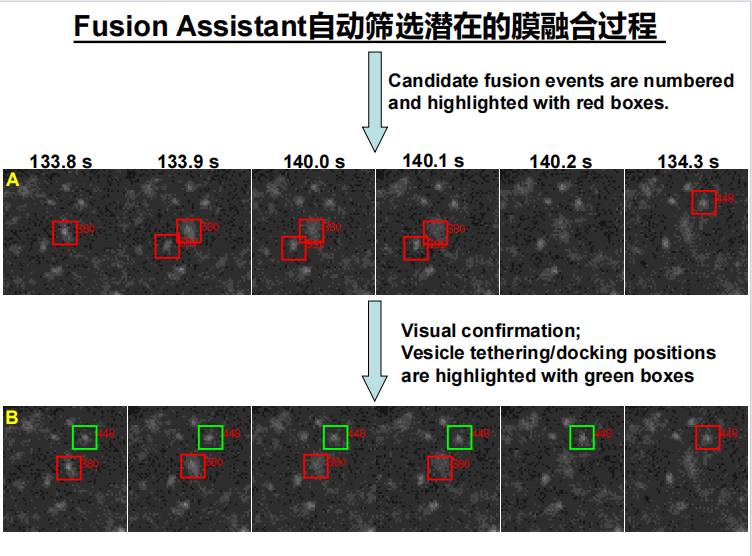
- 拉普拉斯掩模前需要进行高斯掩模(加权平滑滤波)去除噪音:
 注:掩模的叠加取决于你追求的效果!
注:掩模的叠加取决于你追求的效果!